控制理论与控制工程是现代工程技术领域的基石,而系统集成则是其关键的应用场景与实践方向。本文将简要介绍控制理论与控制工程的基本概念,并探讨其在系统集成中的重要性。
一、 控制理论概述
控制理论是一门研究动态系统行为,并设计控制器以使其达到预期性能的学科。其核心在于通过测量、比较和校正,使系统输出能够精确、稳定地跟随期望的输入或指令。经典控制理论主要处理单输入单输出的线性时不变系统,以传递函数和频域分析为基础。现代控制理论则扩展到多输入多输出、非线性及时变系统,采用状态空间模型,并融合了最优控制、自适应控制、鲁棒控制等先进方法。
二、 控制工程的内涵
控制工程是将控制理论应用于实际物理系统的工程实践。它涉及从问题定义、系统建模、控制器设计、仿真验证到硬件实现、调试与维护的全过程。控制工程师需要将抽象的数学理论与具体的传感器、执行器、计算机硬件及软件相结合,解决工业自动化、机器人、航空航天、汽车电子、智能建筑等领域中的实际问题。其目标是提升系统的自动化水平、精度、效率、可靠性与安全性。
三、 系统集成的关键角色
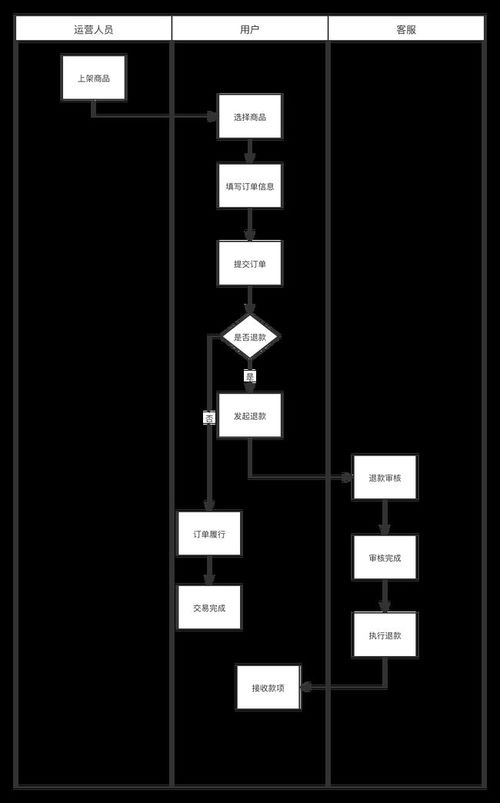
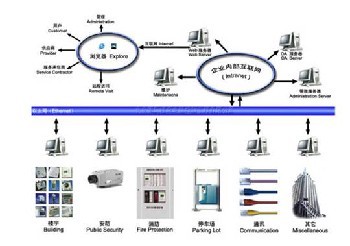
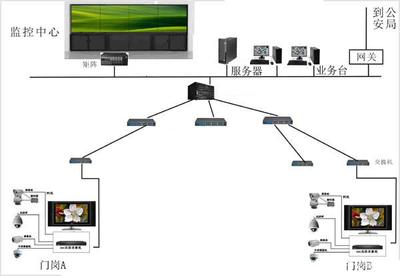
系统集成是将各个独立的子系统、硬件组件、软件模块、网络及数据资源,按照特定应用需求,整合为一个协同工作、功能完备、高效可靠的整体系统的过程。在当今复杂的工业与信息系统中,系统集成已成为实现复杂功能与智能化的必由之路。
四、 控制理论与工程在系统集成中的应用与融合
在系统集成项目中,控制理论与控制工程发挥着不可或缺的核心作用:
- 提供统一的设计框架:控制理论为理解异构子系统(如机械、电气、液压、信息子系统)的动态交互提供了数学模型和设计语言。通过系统辨识与建模,可以将复杂的物理系统抽象为可分析、可控制的对象。
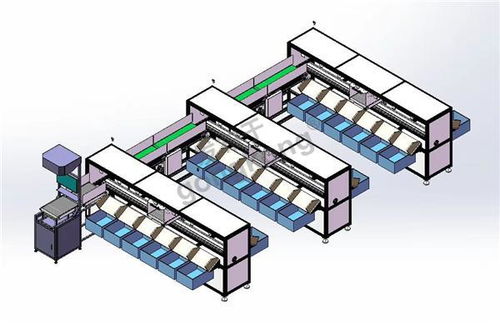
- 实现协同与优化:在多子系统集成的场景下(如智能制造生产线、智能楼宇管理系统),现代控制方法(如多变量控制、分布式控制、模型预测控制)能够协调各子系统的动作,实现全局性能最优,避免子系统间的冲突与资源浪费。
- 保证系统稳定性与鲁棒性:集成系统常面临参数变化、外部干扰和模型不确定性。鲁棒控制理论能够确保系统在非理想条件下仍能稳定运行并满足性能指标,这是大型集成系统可靠性的关键保障。
- 驱动智能化集成:随着人工智能的发展,控制理论与机器学习、数据驱动方法相结合,催生了智能控制。这使得系统集成不再局限于固定的控制逻辑,而是能够通过数据学习、自适应调整,实现更智能的感知、决策与执行一体化,例如在无人驾驶汽车或智能电网中的集成应用。
- 贯穿全生命周期:从集成方案的初期仿真验证,到实时控制算法的软件实现(如PLC、DCS、嵌入式代码),再到部署后的监控与故障诊断,控制工程的方法与工具贯穿于系统集成设计、实施与运维的每一个阶段。
结论
控制理论与控制工程是系统集成的“大脑”与“神经中枢”。它们不仅提供了分析和设计复杂动态系统的科学工具,更在工程实践中将分散的部件融合为智能、高效、可靠的有机整体。在工业4.0、物联网和人工智能技术飞速发展的今天,深入掌握控制理论并将其娴熟地应用于系统集成,是推动技术创新和产业升级的关键能力。未来的系统集成将更加注重开放性、互操作性和智能自主性,这对控制学科提出了新的挑战,也开辟了更广阔的发展空间。